抽象数据类型“映射”:ADT Map
Python最有用的数据类型之一“字典”
字典是一种可以保存key-data键值对的数据类型
其中关键码key可用于查询关联的数据值data
这种键值关联的方法称为“映射Map”
ADT Map的结构是键-值关联的无序集合
关键码具有唯一性,通过关键码可以唯一确定一个数据值
ADT Map定义的操作如下:
- Map():创建一个空映射,返回空映射对象;
- put(key, val):将key-val关联对加入映射中,如果key已存在,将val替换旧关联值;
- get(key):给定key,返回关联的数据值,如不存在,则返回None;
- del:通过del map[key]的语句形式删除key-val关联;
- len():返回映射中key-val关联的数目;
- in:通过key in map的语句形式,返回key是否存在于关联中,布尔值
实现ADT Map
使用字典的优势在于, 给定关键码key,能够很快得到关联的数据值data
为了达到快速查找的目标, 需要一个支持高效查找的ADT实现
可以采用列表数据结构加顺序查找或者二分查找,当然,更为合适的是使用前述的散列表来实现,这样查找可以达到最快O(1)的性能
下面, 我们用一个HashTable类来实现ADT Map, 该类包含了两个列表作为成员
- 其中一个slot列表用于保存key
- 另一个平行的data列表用于保存数据项
在slot列表查找到一个key的位置以后,在data列表对应相同位置的数据项即为关联数据
实现ADT Map:应用实例
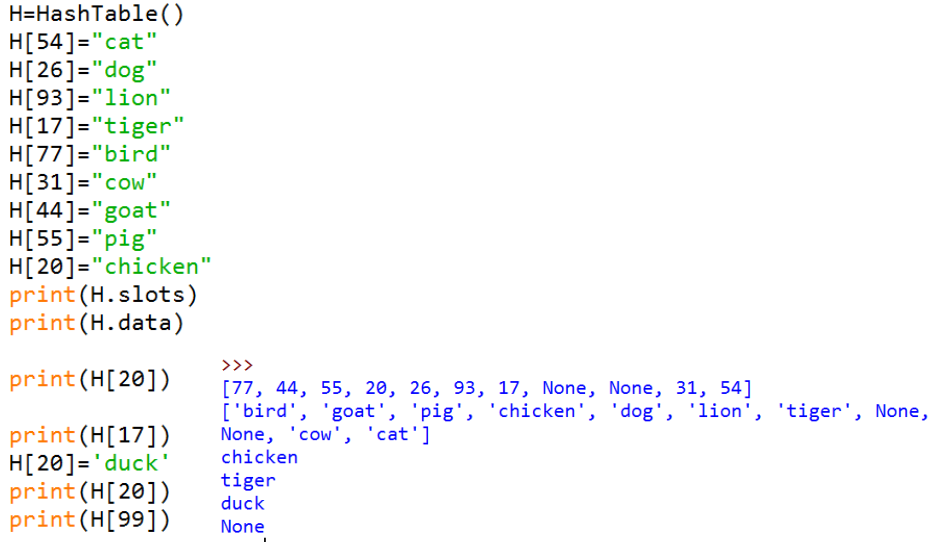
保存key的列表就作为散列表来处理, 这样可以迅速查找到指定的key
注意散列表的大小, 虽然可以是任意数,但考虑到要让冲突解决算法能有效工作,应该选择为素数。
class HashTable:
def __init__(self):
self.size = 11
self.slots = [None] * self.size
self.data = [None] * self.size
实现ADT Map: put方法代码
hashfunction方法采用了简单求余方法来实现散列函数, 而冲突解决则采用线性探测“加1”再散列函数。
def hashfunction(self, key):
return key % self.size
def rehash(self, oldhash):
return (oldhash + 1) % self.size
def put(self, key, data):
hashvalue = self.hashfunction(key)
if self.slots[hashvalue] == None:
# key不存在,未冲突
self.slots[hashvalue] = key
self.data[hashvalue] = data
else:
# key已存在,替换val
if self.slots[hashvalue] == key:
self.data[hashvalue] = data
else:
nextslot = self.rehash(hashvalue)
# 散列冲突,再散列,直到找到空槽或者key
while self.slots[nextslot] != None and self.slots[nextslot] != key:
nextslot = self.rehash(nextslot)
if self.slots[nextslot] == None:
self.slots[nextslot] = key
self.data[nextslot] = data
else:
self.data[nextslot] = data
实现ADT Map: get方法
def get(self, key):
# 标记散列值为查找起点
startslot = self.hashfunction(key)
data = None
stop = False
found = False
position = startslot
# 找key,直到空槽或回到起点
while self.slots[position] != None and not found and not stop:
if self.slots[position] == key:
found = True
data = self.data[position]
else:
# 未找到key,再散列继续找
position=self.rehash(position)
if position == startslot:
# 回到起点
stop = True
return data
实现ADT Map:附加代码
通过特殊方法实现[]访问
def __getitem__(self, key):
return self.get(key)
def __setitem__(self, key, data):
self.put(key, data)
散列算法分析
散列在最好的情况下, 可以提供O(1)常数级时间复杂度的查找性能
由于散列冲突的存在,查找比较次数就没有这么简单
评估散列冲突的最重要信息就是负载因子*,一般来说:
如果*较小,散列冲突的几率就小,数据项通常会保存在其所属的散列槽中
如果*较大,意味着散列表填充较满,冲突会越来越多,冲突解决也越复杂,也就需要更多的比较来找到空槽;如果采用数据链的话,意味着每条链上的数据项增多
如果采用线性探测的开放定址法来解决冲突(*在0~1之间)
成功的查找,平均需要比对次数为: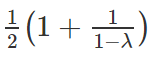
不成功的查找,平均比对次数为: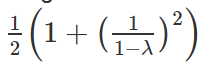
如果采用数据链来解决冲突(*可大于1)
成功的查找,平均需要比对次数为: 1+*/2
不成功的查找,平均比对次数为: *
版权声明:本文不是「本站」原创文章,版权归原作者所有 | 原文地址: