最小生成树
在生活中我们可能会遇到诸如多个地点架设通信网络、水管等等问题,如何设计出最小的成本的方案?
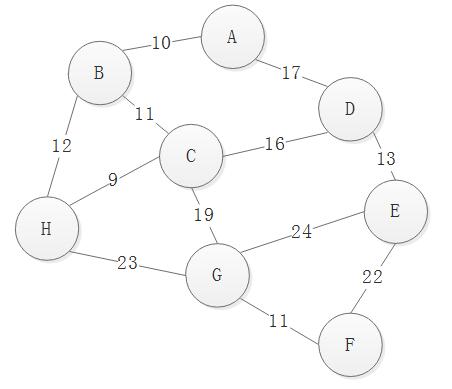
图1图 1
上图是一个带权值的图,即网结构。所谓的最小成本,就是n n 个顶点,用n−1 n − 1 条边把一个连通图连接起来,并且使得权值的和最小。像这样把构造连通网的最小代价生成树称为最小生成树( Minimun Cost Spanning Tree)。
找连通网的最小生成树,经典的有两种算法,普里姆算法和克鲁斯卡尔算法。
普里姆( Prim )算法
假设N=(P,{ E}) N = ( P , { E } ) 是连通网,TE T E 是N N 上最小生成树中边的集合。算法从U={ u0}(u0*V) U = { u 0 } ( u 0 * V ) , TE={ } T E = { } 开始。重复执行下述操作:在所有u*U,v*V−U u * U , v * V − U 的边(u,v)*E ( u , v ) * E 中找一条代价最小的边(u0,v0) ( u 0 , v 0 ) 并入集合TE T E ,同时v0 v 0 并入U U ,直至U=V U = V 为止。此时TE T E 中必有n−1 n − 1 条边,则T=(V,{ TE}) T = ( V , { T E } ) 为N N 的最小生成树。相关代码如下:
void Graph::MiniSpanTree_Prim()//Prim 算法生成最小生成树
{
vector<int> adjvex;//保存顶点下标
vector<int> lowcost;//保存顶点间边的权值
int min,j,k;
lowcost.push_back(0);
adjvex.push_back(0);
for (int i =1; i < numVertexes; i++)
{
lowcost.push_back(arc[0][i]);
adjvex.push_back(0);
}
for (int i = 1; i < numVertexes; i++)
{
min = INFINITY;
j = 1; k = 0;
while (j < numVertexes)
{
if (lowcost[j] != 0 && lowcost[j] < min)
{
min = lowcost[j];
k = j;
}
j++;
}
cout << "(" << adjvex[k] << "," << k << ")" << endl;
lowcost[k] = 0;
for (j = 1; j < numVertexes; j++)
{
if (lowcost[j] != 0 && arc[k][j] < lowcost[j])
{
lowcost[j] = arc[k][j];
adjvex[j] = k;
}
}
}
}
#include<iostream>
#include "Graph.h"
using namespace std;
int main()
{
Graph G;
G.CreateGraph();
cout << "最小生成树:" << endl;
G.MiniSpanTree_Prim();
system("pause");
return 0;
}
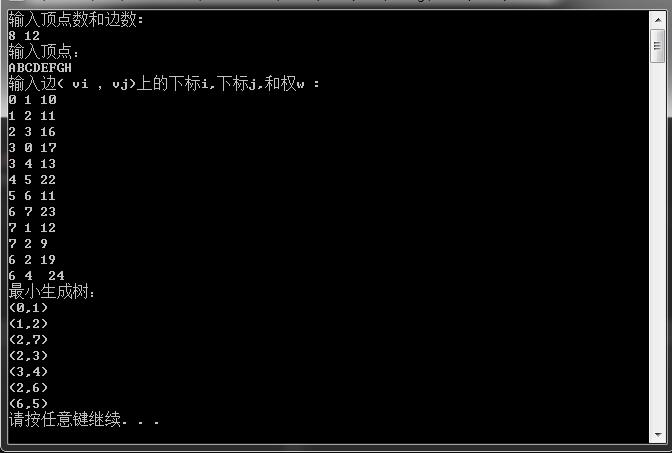
Graph类的相关定义可以看上一篇文(走进数据结构和算法(c++版)(9)——图)中关于邻接矩阵的代码。输入图1中的网图,在VS下运行结果如下:
克鲁斯卡尔( Kruskal )算法
假设N=(V,{ E}) N = ( V , { E } ) 是连通网,则令最小生成树的初始状态为只有n n 个顶点而无边的非连通图T={ V,{ }} T = { V , { } } ,图中每个顶点自成一个连通分量。在E E 中选择代价最小的边,若该边依附的顶点落在T T 中不同的连通分量上,则将此边加入到T T中,否则舍去此边而选择下一条代价最小的边。依次类推,直至T T 中所有顶点都在同一连通分量上为止。相关代码如下:
bool comp(Edge a, Edge b)//比较函数
{
return a.weight < b.weight;
}
void Graph::MiniSpanTree_Kruskal()//Kruskal算法生成最小生成树
{
int n, m;
vector<Edge> edges;
Edge e;
vector<int> parent;
for (int i = 1; i < numVertexes; i++)//将邻接矩阵转化到边集数组
{
for (int j = 0; j < i; j++)
{
if (arc[i][j] != 0 && arc[i][j]!= INF)
{
if (i < j)
{
e.begin = i;
e.end = j;
}
else
{
e.begin = j;
e.end = i;
}
e.weight = arc[i][j];
edges.push_back(e);
}
}
}
sort(edges.begin(),edges.end(),comp);//边集数组排序
for (int i = 0; i < numVertexes; i++)
parent.push_back(0);
for (int i = 0; i < numEdges; i++)
{
n = Find(parent,edges[i].begin);
m = Find(parent, edges[i].end);
if (n != m)
{
parent[n] = m;
cout << "(" << vexs[edges[i].begin] << "," << vexs[edges[i].end] << ")" << " " << edges[i].weight << endl;
}
}
}
int Graph::Find(vector<int> & parent, int f)
{
while (parent[f]>0)
f = parent[f];
return f;
}
#include<iostream>
#include "Graph.h"
#include<algorithm>
using namespace std;
int main()
{
Graph G;
G.CreateGraph();
cout << "最小生成树:" << endl;
G.MiniSpanTree_Kruskal();
system("pause");
return 0;
}
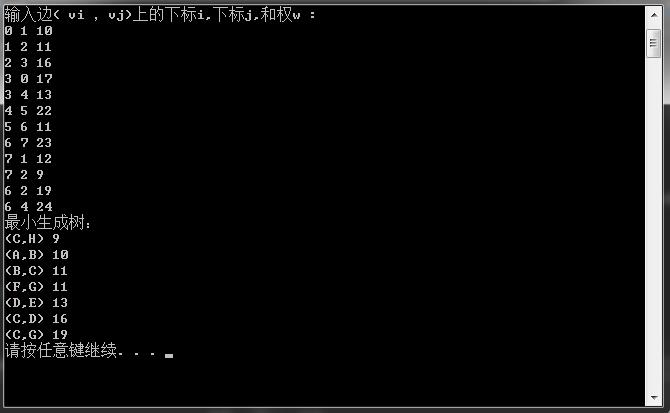
输入图1中的网图,在VS下运行结果如下:
两种算法比较
克鲁斯卡尔算法主要是针对边来展开,边数少时效率会非常高,所以对于稀疏图有很大的优势i;而普里姆算法对于稠密图,即边数非常多的情况会更
好一些。
版权声明:本文不是「本站」原创文章,版权归原作者所有 | 原文地址: